 von
von | |
Deutsche Marine — Minentaucher erproben modernste Technologie — Einsatz eines Autonomen Unterwasserfahrzeuges (AUV)
 |
| Unterstützung für die Minentaucher: Die Drohne REMUS in der Erprobung, sie kann mit einem einzigen Arbeitsgang Daten über Wassertiefe, Wassertemperatur und den Salzgehalt liefern. Außerdem fertigt sie unter anderem Sonarbilder und Seekarten auf denen Minen fast wie auf einem Foto unter Wasser zu erkennen sind. Bildquelle: Deutsche Marine |
Glücksburg / Eckernförde — Seit einiger Zeit testen die Minentaucher der SEK M (Spezialisierte Einsatzkräfte der Marine) ein hochmodernes Gerät zur Detektion von Seeminen und zur Untersuchung des Meeresbodens, ein sogenanntes Very Shallow Water (VSW) AUV. Dieses Gerät kann die Leistung eines Minentauchers bei der Suche nach Minen, Munition und anderen Gegenständen am Meeresgrund um ein Vielfaches steigern und die hochwertige Ressource Minentaucher auf die wesentlichen Aufgaben begrenzen Minenvernichtung bzw. Unschädlichmachen von Minen und anderen Explosivstoffen. AUVs sind das Mittel der (nahen) Zukunft, um Minenabwehr auf Reeden, in Häfen oder im Vorstrandbereich erheblich zu beschleunigen.
Das System
Mit nur 37 kg Gewicht ist das VSW AUV in der Lage, 100m tief zu tauchen und viele Stunden unter Wasser zu bleiben. Ausgestattet mit einem handelsüblichen Side Scan Sonar taucht es 2–3m über Grund und erzielt eine Suchstreifenbreite von ca. 15m ‑20m zu jeder Seite. Bei einer Suchgeschwindigkeit von 3 Knoten ist die maximale Einsatzdauer von 22 Stunden zu erreichen; selbst bei 5 Knoten sind noch 8 Stunden Einsatzdauer durch dieses 160cm lange Gerät zu erzielen. Parallel zum Sonareinsatz werden Wassertemperatur, Salinität und Wassertiefe gemessen und in einem Kartenausschnitt anschließend zur Verfügung gestellt. Die Navigation erfolgt durch ein Long Baseline System (akustisches Positionierungssystem) oder Dead Reckoning (Koppelnavigation).
 |
| Abb.1 Das VSW AUV-Erprobungsgerät, “Remus-Drohne”, der Minentaucherkompanie. Bildquelle: Deutsche Marine |
Der Personalaufwand für den Einsatz ist denkbar gering: Entweder von einem Schlauchboot aus auf See oder einer Pier im Hafen, kann das Gerät von lediglich zwei Mann zu Wasser gebracht werden. Vor Beginn des Einsatzes wird die Mission an einem Laptop genau geplant, während die Batterien des AUVs nachgeladen werden. Nach wenigen Minuten ist die Missionsplanung abgeschlossen, dann wird das AUV durch die Bordbesatzung des Schlauchbootes zu Wasser gelassen. Nach Planung der Mission werden die beiden Transponderbojen ausgebracht, die die Unterwassernavigation des AUVs ermöglichen. Anschließend geht das AUV selbst zu Wasser und fährt sekundengenau seine Mission ab. Es wirkt verblüffend, wie präzise es seine Mission abfährt und exakt am vorgeplanten Ort wieder auftaucht. Nach Ende der Mission werden die Ergebnisse der Mission heruntergeladen und die Akkus neu aufgeladen — ein Vorgang, der zwischen 10 und 20 Minuten dauert. Im Anschluss kann die zwischenzeitlich neu geplante Mission aufgespielt werden und ein neuer Einsatz des AUV beginnen.
Operative Erfahrungen
Die Deutsche Marine hat mit dem VSW AUV bereits eigene Marinestützpunkte, Übungsminenfelder und Reeden abgesucht sowie diesen in Vorbereitung des G8-Gipfels vor Heiligendamm eingesetzt (in Amtshilfe der Polizei). Das Gerät kann aufgrund seiner geringen Abmessungen und Masse kurzfristig per LKW, Hubschrauber oder Schiff an seinen Einsatzort verbracht werden. Das AUV ist auch für Operationen mit geringer Sichtbarkeit (verdeckte Operationen) geeignet.
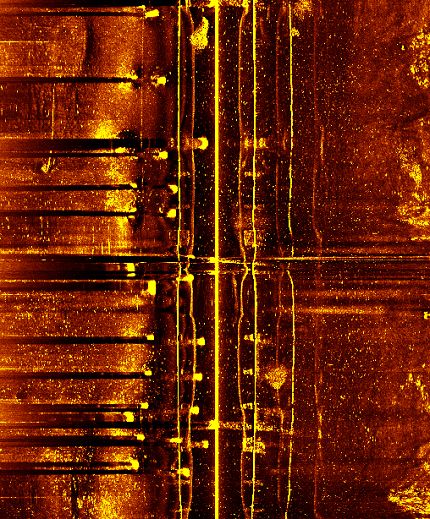 |
| Abb 3. Wasserfallbild der “Remus-Drohne”. Bildquelle: Deutsche Marine |
Es kann in allen Gewässern eingesetzt werden, in denen sicher mit Schlauchbooten operiert werden kann, also auch in Binnengewässern und Flüssen. Aufgrund seiner hohen Wendigkeit kann das AUV bis in fast jede kleine Ecke eines Hafenbeckens einfahren. Seine Grenzen findet das System bei starker Strömung und größerem Seegang.
Genauer als jeder Taucher es kann, werden lokalisierte Objekte auf dem Meeresboden kartografiert und können so in Datenbanken beim Mine Warfare Data Center (MWDC) eingepflegt werden. Die “eingefahrenen” Sonarbilder werden zu einem sogenannten Mosaik (Abb.7: Sonarmosaik des ehemaligen Marinestützpunktes Olpenitz) zusammengefügt und ergeben so eine detailgenaue Abbildung der Bodenkontakte in Form einer Bodenkarte, die auch gewisse Rückschlüsse auf die Bodenbeschaffenheit zuläßt. Weiter werden diverse Datenlayer erzeugt. So werden neben den gesammelten Sonarbildern Karten mit der Wassertiefe des Seegebietes, der Salinität sowie den Wassertemperaturen erstellt. Es werden auf diese Weise quasi als Nebenprodukt diverse Informationen gesammelt, die auch für nachfolgende Operationen von großem Wert sein können. Sie finden Eingang in das MWDC.
Die Auswertung
Nachdem die Daten aus dem AUV ausgelesen wurden, schaut sich der Operator die einzelnen “Wasserfallbilder” (Abb.3: Wasserfallbild) an und untersucht sie auf minenähnliche und andere künstliche Objekte. Ein kleines Software-Werkzeug hilft ihm, die detektierten Objekte zu klassifizieren; dazu werden die Länge und die Breite des Objektes anhand seines Sonarschattens vermessen. So können z.B. zu kleine, munitionsuntypische Objekte ausgeschlossen werden, denn bei einer Sonarfrequenz von 900 kHz werden kleinere Kontakte wie sogar Coladosen abgebildet. Die Kontakte werden markiert und erscheinen anschließend als Positionen auf der Auswertekarte mit den abgefahrenen Suchstreifen (Abb. 4: Tracks). Eine Zuordnung der numerisch bezeichneten Positionen mit den Sonarbildern ermöglicht so z.B. eine detaillierte Analyse mit Sonardaten anderer Systeme und eine eindeutige Zuordnung für die Minenjagddatenbank. Heutige AUVs sind bislang nicht in der Lage, Munition zu vernichten oder auf andere Art unschädlich zu machen. Hier ist nach wie vor die Expertise der Minentaucher gefragt.
Zunächst aber werden die durch AUVs gewonnenen und anschließend bewerteten (klassifizierten) Kontakte durch Minentaucher identifiziert. Eine mitgeführte Digitalkamera liefert die fotografische Dokumentation für die Minenjagddatenbank des MWDC und macht die Identifizierung der Kontakte nachvollziehbar (vergleiche hier Kontakt 14, Foto Abb.5+6). Abhängig von der Umwelt und maritimen Infrastruktur wird dann entschieden, wie die erkannte Munition unschädlich gemacht wird.
Der operative Nutzen
 |
| Abb 4. Bild des Kontakts, das mit der “Remus-Drohne” aufgenommen wurde. Bildquelle: Deutsche Marine |
VSW AUVs, gerne als verlängerter Arm der Minentaucher bezeichnet, liefern präzise und anders als bei Minentauchern nachvollziehbare Dokumentationen. Diese AUVs eignen sich zum Einsatz auf Reeden, in Strandnähe und in Häfen oder anderen Offshore Installationen sowie in Binnengewässern. Hier ist es endlich möglich, dass das Gesehene durch andere, nicht beim Tauchgang Beteiligte mit ausgewertet werden kann und anschließend die Daten in einer Minenjagddatenbank abgelegt werden können. Bestechend ist der Zeitvorteil gegenüber Minentauchern und die um ein Vielfaches größere Flächensuchleistung. Unter optimalen Bedingungen rechnen wir bei einem Minentaucher mit einer Suchgeschwindigkeit von 0,5 Knoten und einer Suchstreifenbreite von 3m. Dies entspricht einer abgesuchten Fläche von knapp 3000 qm pro Stunde.
Ein VSW AUV schafft durchschnittlich 3 Knoten bei einer angenommenen Suchstreifenbreite von 2x20m. Dies entspricht einer theoretischen Suchfläche von deutlich über 200.000 qm pro Stunde. Durch die anschließende Datenanalyse und die Tauchgänge zur Identifizierung der Kontakte reduziert sich zwar diese Flächensuchleistung um bis zu 50% auf die effektive Flächensuchleistung. Dies ist allerdings immer noch mit mehr als 100.000 qm pro Stunde ein beeindruckender Wert.
Aufgrund der speicherbaren Sonarbilder ist auch eine sogenannte Change Detektion möglich, hierunter wird ein Vorher-Nachher-Vergleich von Sonarbildern aus demselben Gebiet verstanden. So müssen lediglich neu hinzugekommene Kontakte identifiziert werden, was Minenabwehroperationen deutlich beschleunigt.
Operative und technische Konsequenzen
 |
| Abb 5. Der Kontakt entpuppt sich als Betonpfeiler mit eckigem Bauteil. Bildquelle: Deutsche Marine |
VSW AUVs haben ihre Bedeutung in der Minenabwehr mehr als deutlich nachgewiesen. An den Erfahrungen des geschilderten Erprobungsträgers wird deutlich, wie wichtig die Einführung eines derartigen Systems für die Deutsche Marine ist. Die oben geschilderten Vorteile gilt es nun in einer geschickten Kombination aus Minentauchern und AUVs zu nutzen. Der Minentaucher braucht nicht mehr für die aufwendige Flächensuche eingesetzt zu werden, sondern er wird nur zur Relokalisierung, Identifizierung und anschließenden Vernichtung der Minen gefordert. Liegt die Munition in der Nähe von empfindlicher Infrastruktur, muss sie erst mittels Hebeballons und Schlauchbooten durch die Minentaucher an einen sicheren Ort verschleppt werden (das sog. Remove), bevor sie vernichtet werden kann.
So ist es möglich, in einer sinnvollen Kombination das AUV zur Flächensuche einzusetzen, während die Minentaucher die Sonarbilder auswerten, um dann anschließend nur die Positionen anzutauchen, an denen die Sonarbilder minenähnliche Kontakte zeigen. Bei einem richtigen Mix aus mehreren AUVs und Minentaucherteams ist man so in der Lage, eine Minenräumoperation in einem Hafen deutlich schneller als bisher zu Ende zu führen. Hier ist der parallele Einsatz von mehreren AUVs denkbar, um so sehr zeitkritisch einen Hafen auf die Anwesenheit von Munition abzusuchen
Erkennbar ist allerdings auch, dass mit AUVs der Umfang von Mine Warfare Data erheblich steigen wird. Es werden zukünftig in kurzer Zeit große Datenmengen aufkommen, die zu analysieren und zu dokumentieren sind. Hier gilt es, die Mine Warfare Data Centers (im Einsatzgebiet wie auch im Heimatland) in ihren Kapazitäten zu überprüfen und regelmäßig an die neuen Anforderungen anzupassen.
Identify, Remove und Render Safe (sicheres Bergen von Munition) sind Aufgaben, die bislang nur Minentaucher leisten können. Hier ist es erforderlich, zukünftig einen Schwerpunkt in Forschung und Entwicklung zu bilden und somit den wertvollen Minentaucher, das Personal noch besser zu schützen und weniger Risiken auszusetzen.
Aber auch in der AUV-Technologie gilt es hier die Entwicklung voranzutreiben. Untersuchenswert ist die Schwarm-Technologie, der parallele Einsatz und die Interaktion von mehreren AUVs. Es ist sinnvoll, Verfahren zu entwickeln, die eine autonome Identifizierung von Minen und anderer Munition ermöglichen. Um die Vernichtung von Munition mit AUVs voranzutreiben, ist es weiter erforderlich autonome Verfahren zu entwickeln, die eine Vernichtung von Munition ohne Kollateralschäden ermöglichen.
Zusammenfassung und Ausblick
 |
| Unterstützung für die Minentaucher: Die Drohne REMUS in der Erprobung, sie kann mit einem einzigen Arbeitsgang Daten über Wassertiefe, Wassertemperatur und den Salzgehalt liefern. Außerdem fertigt sie unter anderem Sonarbilder und Seekarten auf denen Minen fast wie auf einem Foto unter Wasser zu erkennen sind. Bildquelle: Deutsche Marine |
Heutige VSW AUVs führen in der Minenabwehr zu einer deutlichen Qualitäts- und Leistungssteigerung. Aufgrund ihrer erhöhten Minenjagdeffektivität ermöglichen sie eine deutliche Beschleunigung von Minenabwehroperationen. Kurz und ganz simpel gesagt: Will man Minenabwehroperationen beschleunigen, ist es nur eine Frage, wie viele AUVs (und Minentaucher) man gewillt ist einzusetzen. Dennoch ist auch über die Weiterentwicklung von AUVs nachzudenken, um ihre Fähigkeiten zur Vernichtung von Munition voranzutreiben.
Zum Autor Fritz-Rüdiger Klocke ist Fregattenkapitän und im Glücksburger Flottenkommando Dezernent für Minenabwehr und Mineneinsatz und als solcher zuständig für die Minentaucherkompanie. Als Kommandant fuhr er auf Minensuchbooten sowie Minenjagdbooten und nahm mehrfach an OPEN SPIRIT teil. Seit 2001 ist er dienstlich mit Autonomen Unterwasserfahrzeugen (AUV) für die Minenabwehr befasst. In seiner Verwendung am NATO HQ SACT in Norfolk, Virginia, USA war er u.a. für Forschungs- und Entwicklungsvorhaben mit AUVs am NATO Undersea Research Center in La Spezia, Italien zuständig.
Fotos: Deutsche Marine
Abb 1: Das VSW AUV-Erprobungsgerät der Minentaucherkompanie Abb 3: Wasserfallbild Abb 4+5: Der Kontakt entpuppt sich als Rest eines Betonpfeilers mit eckigem Bauteil, das sowohl im Sonarbild wie auf dem Foto deutlich zu erkennen ist.
Quelle/Pressekontakt:
Presse- und Informationszentrum Marine
Stabsbootsmann Detlef Struckhof
Telefon: 0 46 31 — 6 66 — 44 14 / 44 00
E‑Mail: piz@marine.de
Fotoredaktion Marine: 0 46 31 — 6 66 — 44 32